
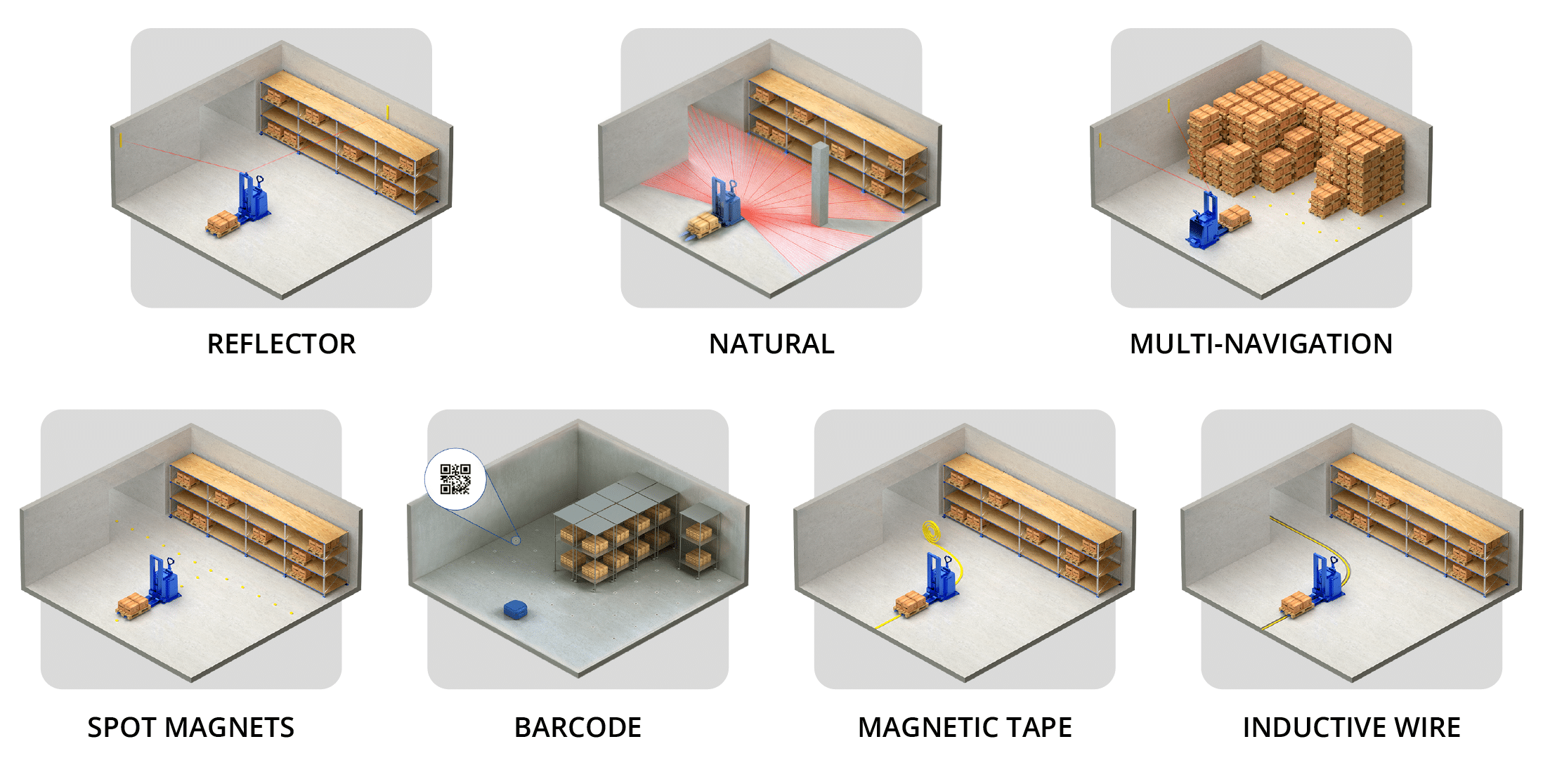
Formas de controlar los AGV
Navegación AGV
¿No estás seguro de qué opción de navegación necesitas?
Solicite una consulta gratuita
Preguntas y respuestas
¿Cuál es la diferencia entre AGV y AMR? ¿Por qué AGV?
Los AGV (vehículos guiados automatizados) se guían por una ruta preestablecida y se mantienen en ella. Cuando se detecta un objeto, el AGV se detiene hasta que el objeto se retira de la ruta.
Los AMR (robots móviles autónomos) funcionan de forma independiente y pueden moverse libremente sorteando obstáculos. Sin embargo, la mayoría de las aplicaciones de fabricación utilizan AGV, ya que las líneas de montaje presentan pocas o ninguna variable u obstáculo.
